ساخت ربات جراح توسط پژوهشگران دانشگاه تهران و دانشگاه علوم پزشکی تهران
مدل جدید سامانه جراحی رباتیک سینا به نام «فِلِکس»، حاصل همکاری استادیار طراحی صنعتی پردیس هنرهای زیبا دانشگاه تهران در بخش طراحی صنعتی این پروژه و استادیار مرکز تحقیقات فناوریهای بیومدیکال و رباتیک دانشگاه علوم پزشکی تهران در بخش طراحی رباتیک و اجرای این پروژه، ساخته شد.
دکتر نسرین مقدم، استادیار طراحی صنعتی پردیس هنرهای زیبای دانشگاه تهران و مدیر پروژه در بخش طراحی صنعتی، با همکاری دکتر علیرضا میرباقری، استادیار دانشگاه علوم پزشکی تهران و معاون پژوهشی مرکز تحقیقات فناوریهای بیومدیکال و رباتیک، از سال ۱۳۹۵ پروژه طراحی صنعتی ربات جراحی سینا مدل فِلِکس را آغاز کردند.
این دستاورد در ششمین نمایشگاه تجهیزات و مواد آزمایشگاهی ساخت ایران که سوم دی ماه ۹۷ در محل دائمی نمایشگاههای بینالمللی تهران برگزار شد رونمایی شد.
سامانه جراحی رباتیک سینا مدل فِلِکس که حاصل تلاش ۱۵ ساله متخصصان در مرکز تحقیقات فناوریهای بیومدیکال و رباتیک دانشگاه علوم پزشکی تهران است، میتواند در انواع عملهای آموزشی جراحی (مدلهای حیوانی) در حفره شکمی و قفسه سینه حتی از راه دور مورد استفاده قرار گیرد.

درباره ربات جراح سینا
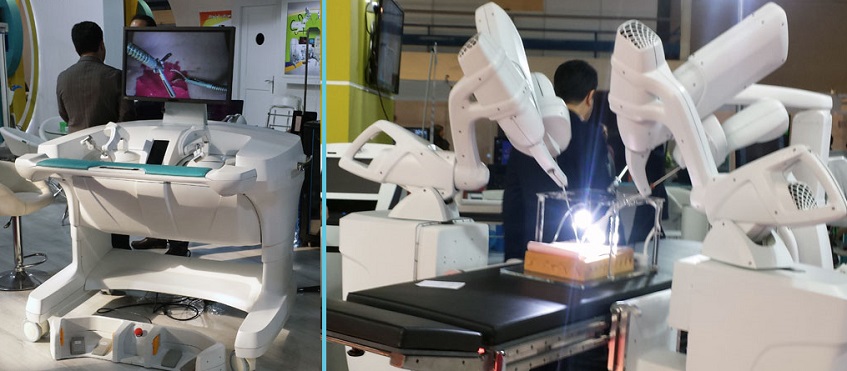
سامانه جراحی رباتیک سینا مدل فِلِکس میتواند در انواع عملهای آموزشی جراحی (مدلهای حیوانی) در حفره شکمی و قفسه سینه حتی از راه دور مورد استفاده قرار گیرد. این سامانه از دو بخش اصلی: ۱- کنسول جراحی از راه دور و ۲- رباتهای جراح مستقر بر بالین بیمار (شامل اسلیوها و روبولنز) تشکیل شده است. دستههای موجود در کنسول جراحی حرکات دستان جراح را ثبت و همزمان رباتهای جراح بر بالین بیمار، همان حرکات را در بدن بیمار اجرا میکنند. ارتباط بین رباتهای راهبر در کنسول جراحی با رباتهای پیرو بر بالین بیمار از طریق اینترنت میسر شده است و لذا عمل جراحی میتواند در دورترین نقاط کشور یا حتی بر روی یک ناو اقیانوسپیما از راه دور کنترل و انجام شود.
سامانه جراحی رباتیک سینا با موفقیت در آزمونهای فنی و حیوانی اولیه تست شده و قرار است نمونههای جدید آن در مراکز آموزشی بیمارستانهای سینا و شریعتی دانشگاه علوم پزشکی تهران به منظور آموزش روشهای جراحی رباتیک روی مدلهای حیوانی مورد بهرهبرداری قرار گیرند.
قابلیتهای منحصر به فرد و مزیتهای رقابتی این ربات در مقابل نمونه خارجی عبارتند از:
• قابلیت بازخورد و انتقال حس لامسه از محل عمل به دستان جراح
• قابلیت اتصال به یک سمت یا هر دو سمت تخت جراحی (بسته به نوع عمل) و حرکت همراه با تخت جراحی و بیمار حین عمل
• قابلیت استفاده از ابزارهای متداول جراحی و عدم نیاز به ابزارهای مصرفی خاص و گرانقیمت
• قابلیت تغییر حالت استفاده توسط جراح از نشسته به ایستاده و بالعکس حین عمل جراحی
• عدم نیاز به هزینههای گزاف تعمیر و نگهداری سالیانه در مقایسه با نمونه خارجی
• قیمت رقابتی کمتر از نصف تنها رقیب آمریکایی.